Description
| Geometry | Mass |   |
|---|---|---|
| Spring contant |   |
|
| Mesh | No. of divisions | 1 |
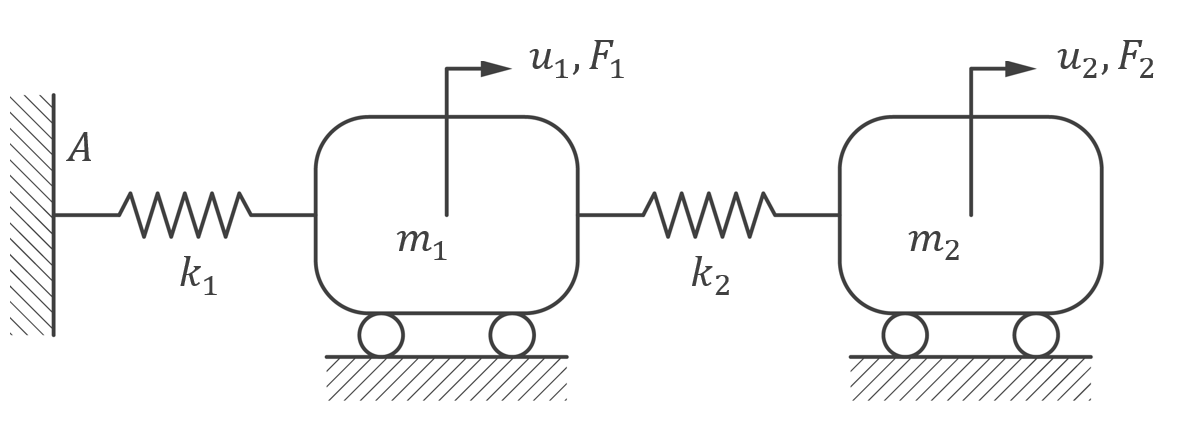
How to model this mass-spring system in Diamonds?
Diamonds is not intended to model mass-spring systems. However, with a little out-of-the box thinking, it’s possible to model certain types of mass-spring systems.
- Diamonds doesn’t contain spring-elements, but they can be modelled using a weightless bar.
The spring constant of a bar can be written as:
of a bar can be written as:  (see this article).
(see this article).
If we choose and
and  , we can calculate the bar length
, we can calculate the bar length  resulting in the spring constant .
resulting in the spring constant .
![\[L_1=\frac{E \cdot A}{k}=\frac{40N/mm^2 \cdot 25mm^2}{4000N/m} = 0.25m\]](https://support.buildsoft.eu/wp-content/ql-cache/quicklatex.com-e4bc625321ab7523d288e0eb66a94323_l3.png "Rendered by QuickLaTeX.com")
![\[L_2=\frac{E \cdot A}{k}=\frac{40N/mm^2 \cdot 25mm^2}{6000N/m} = 0.167m\]](https://support.buildsoft.eu/wp-content/ql-cache/quicklatex.com-4e8f3ee62956a420769f7e8db5bb6d04_l3.png "Rendered by QuickLaTeX.com")
So the spring- elements, can be modelled as a weightless bars with area
 , modulus of elasticity
, modulus of elasticity  and lengths
and lengths  and
and  . Let’s name them “spring-bars”.
. Let’s name them “spring-bars”. - Add a new material to the library. Name it “DLD 01”.
Set Young’s modulus equal to and the density  very small because we want weightless bars. The other mechanical material properties are irrelevant.
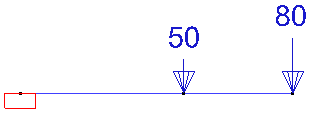
very small because we want weightless bars. The other mechanical material properties are irrelevant. - The masses
 [kg] must be modelled as forces
[kg] must be modelled as forces  [kN].
[kN].
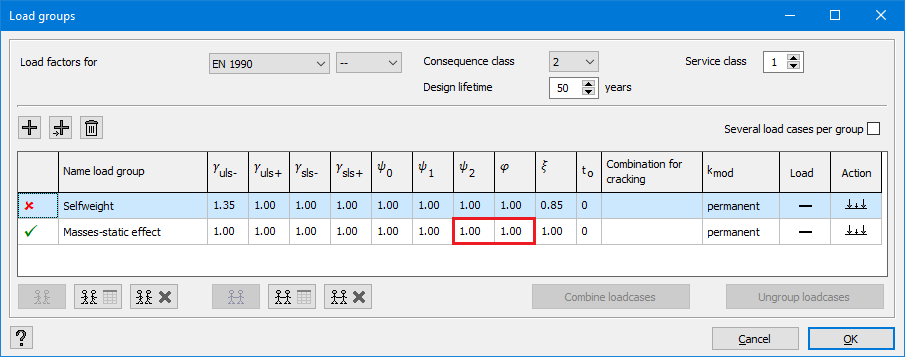
Create a new load group ‘Masses static effect’. The partial safety factors and combination factors are not relevant, but make sure and
and  are equal to 1.
are equal to 1.
- In this example, the masses are meant to move in the in same direction as the springs compress. This determines the orientation of the model. Let’s assume we model the spring-bars horizontally:
- Then the forces (representing the masses) must also be modelled horizontally. But this way, they don’t contribute to the modal mass. Only the vertical forces contribute. So the spring-bars and forces must be modelled vertically.
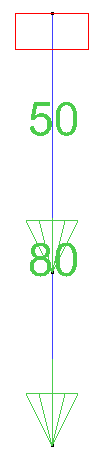
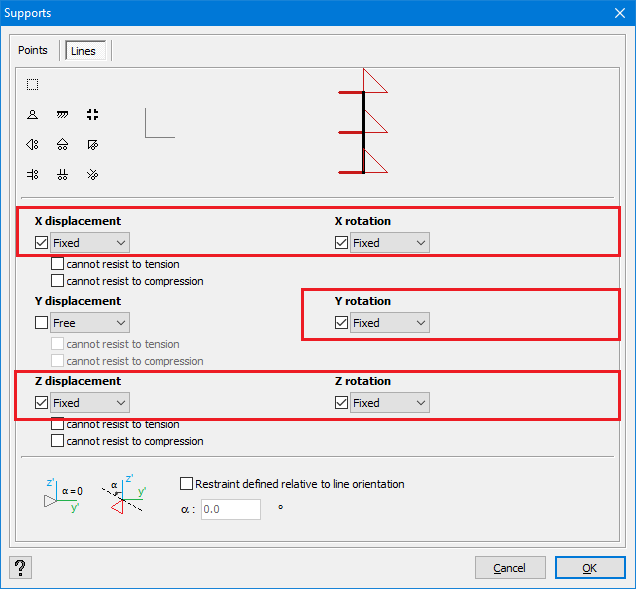
- Because we want a system with 2 DOF, all displacements en rotations along the weightless bars have been prevented, except for the Y-displacement.
- Pendulum-like mass-spring systems cannot be modelled. Neither can a damper.
Results
Eigenfrequenties
| Eigen mode | Independent reference | Diamonds | Difference |
|---|---|---|---|
| 1 | 0.778Hz | 0.778Hz | 0,00% |
| 2 | 2.520Hz | 2.520Hz | 0.00% |
Eigenmodes
| Eigen mode | Independent reference | Diamonds | Difference1 |
|---|---|---|---|
| 1 | u1=0,0671 u2=0,0984 |
u1=67,03 u2=98,38 |
0,00% |
| 2 | u1=0,124 u2=-0,053 |
u1=124,44 u2=-53,00 |
0.00% |
1. Eigenmodes are determined except for a proportionality factor. In Diamonds, the eigen modes are scaled using the units for displacement. In this example, the unit were set to mm. As the result, the eigen modes in Diamonds are scale so that,  , while the reference used a scaling so that
, while the reference used a scaling so that  . If you’d ask the deformations in m instead of mm, you’d see that Diamonds can also use the scale
. If you’d ask the deformations in m instead of mm, you’d see that Diamonds can also use the scale  ..↩
..↩
References
- Hofman, G. E. (2012). Eindige Elementen Methode: Deel 2. MERc, p118
- Tested in Diamonds 2024r01.